Development of nuclear disaster response robot simulation system
原子力災害対応に向けたロボットシミュレーションシステムの開発
(平成27年度~令和3年度)
※Choreonoid向け拡張機能プログラム「HAIROWorldPlugin」をアップデートしました。
研究背景・目的
◇東京電力ホールディングス株式会社福島第一原子力発電所(1F)の廃止措置では、高線量下での作業を伴うため、遠隔操縦ロボットの活用が不可欠
◇数値シミュレーション技術を活用して、ロボットの設計・検証やロボットの操縦訓練を効率的に行うためのシステムを開発
開発成果
システムの構築
Choreonoid※1を基にシステムを構築
ロボットシミュレータの外観

ロボットが階段を走行する実機試験の様子(左)と
シミュレーションによる再現例(右)
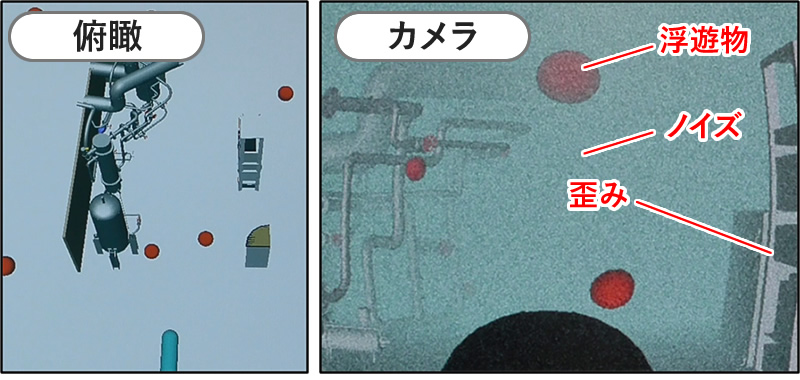
水中ロボットシミュレーション機能の開発
1F建屋内の水没箇所での作業模擬を想定した機能を開発
◇ロボットに作用する水の影響を計算
(揚力、抗力、浮力等)
◇水中での不鮮明なカメラ映像を模擬
(ノイズ、歪み、浮遊物等)
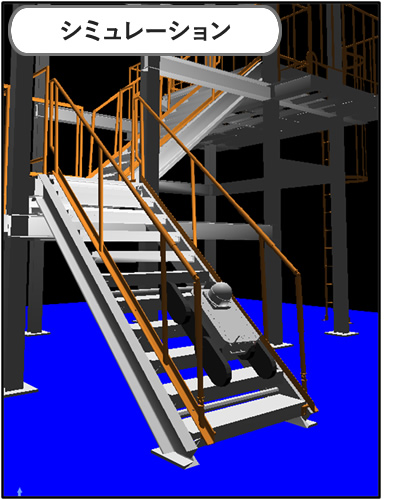
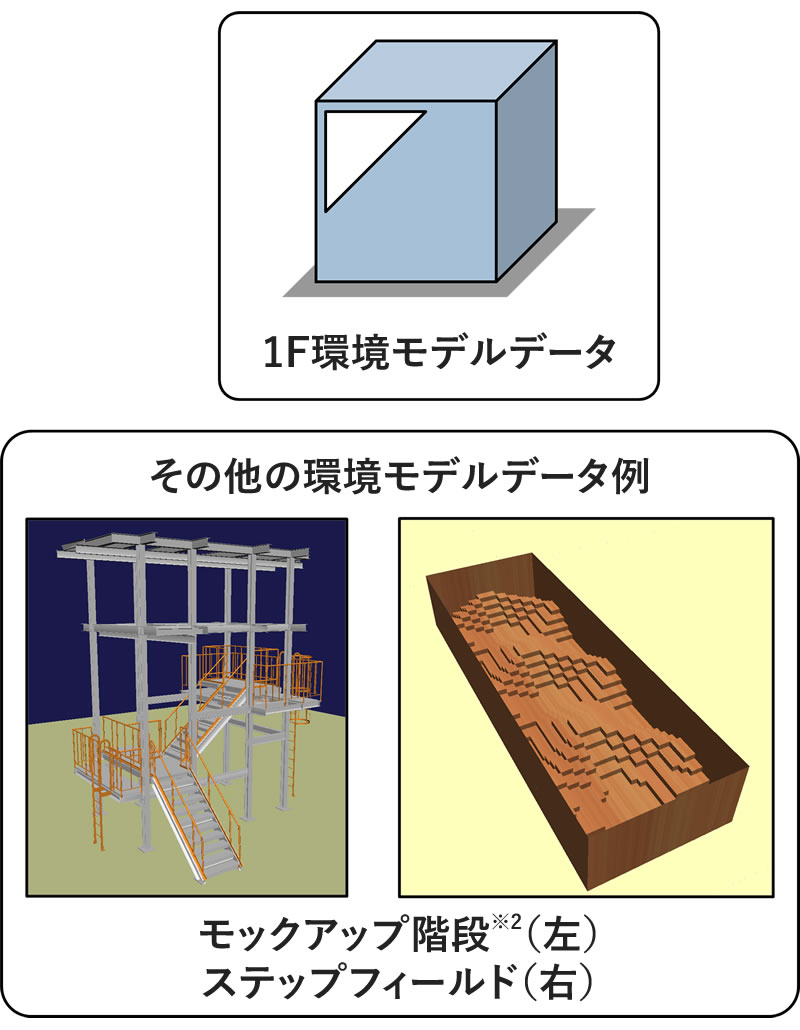
環境モデルデータの整備
シミュレーション内でロボットが動く環境(作業現場や試験設備等)のモデルデータを整備
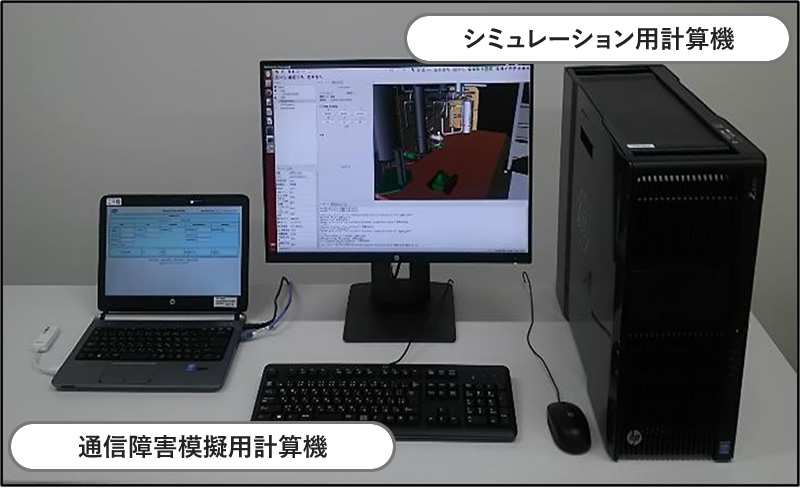
通信障害シミュレーション機能
ロボットの遠隔操作時の通信障害を模擬するための機能を開発
◇通信速度の制限
◇通信の遅延
◇パケットの損失
◇通信のゆらぎ
Choreonoidを基にシミュレーションシステムを構築し、
遠隔操縦ロボットによる作業を模擬するための機能拡張を実施
※1国立研究開発法人産業技術総合研究所が開発した動力学シミュレータ
※2モックアップ階段(楢葉遠隔技術開発センター)