Development of nuclear disaster standard test method
原子力災害対応標準試験法の開発
(平成27年度~令和3年度)
※原子力災害対応用ロボットの性能試験法; 走破性能試験(JAEA-TM-0001, JAEA-TM-0002, JAEA-TM-0003)について公表しました。
※原子力災害対応用ロボットの性能試験法; 貫通孔を介した展開後の走破性能試験 (JAEA-TM-0004、JAEA-TM-0005)について公開しました。
※原子力災害対応用ロボットの性能試験法; ロボットアームによる障害物の乗り 越えを介した接近試験(JAEA-TM-0006)について公開しました。
研究背景・目的
・福島第一原子力発電所廃止措置において、活用が期待されているロボット等の遠隔技術の開発や操作スキルの向上が重要
・遠隔技術の性能、操作者の習熟度を定量的に評価するための指標としての試験法の開発研究
アプローチと成果
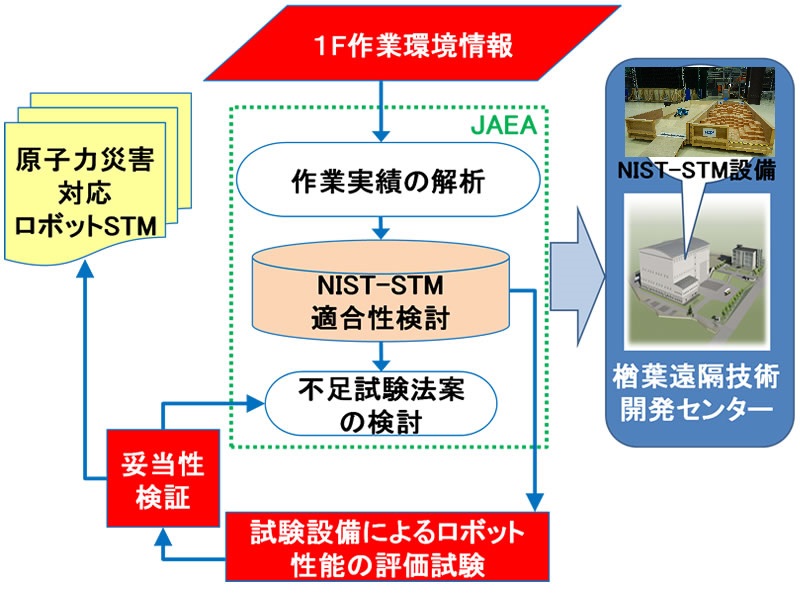
原子力災害対応標準試験法開発フロー
ロボット試験法とシミュレータとの連携
◇ロボットの形状・機構、駆動系、センサ及び環境をモデル化
◇物理計算によってロボットの動作を再現
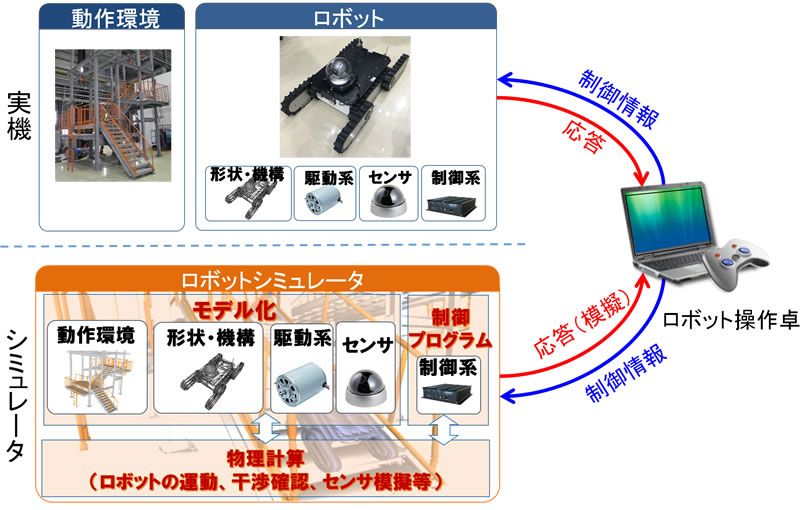
ロボット設計や試験体設計(実機)へ反映
原子力災害対応標準試験法の開発
| ① 動作解析(作業環境リスク) |
|---|
◇1F作業解析からリスクの高い環境をリストアップ ◇NIST-STMとの適合性、不足事項等を検討 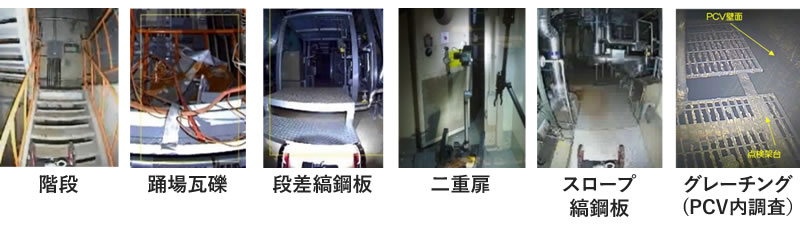 |
| ② 原子力災害対応試験体の設計・開発 (原子炉建屋) |
|---|
◇原子炉建屋内調査向け試験体の設計・開発 ◇金属等の材質による影響を考慮 
原子力災害対応試験体 |
| ③ 原子力災害対応試験体の設計・開発 (PCV内調査) |
|---|
◇原子炉格納容器(PCV)内調査向け試験体の設計・開発 ◇ペネトレーションからのアタックを模擬 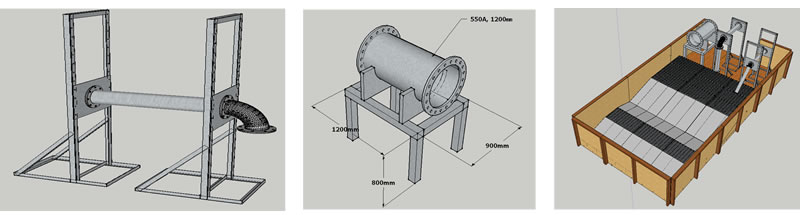
原子炉格納容器(PCV)内調査試験体 |
| ④ 試験環境の構築 |
|---|
◇モジュール単位での組合せによる試験体の構成が可能 ◇試験体の移設が簡素化され、運用時の利便性が向上 
試験体移動台車 |