Remote technology
Development of Robot Simulator for nuclear emergency response robots
Robot simulator for emergency response robots aims to contribute to operation training of robot in adavence and efficient robot dvelopment toward the decomissionning of Fukushima Daiichi Nuclear Power Station(1F) of Tokyo Electric Power Company Holdings, Inc.
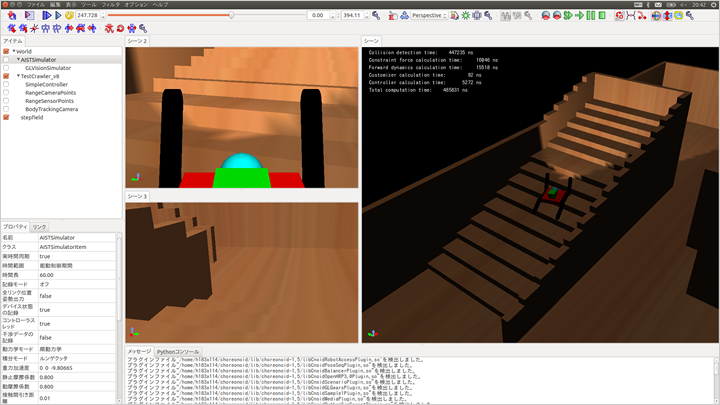
This simulator is based on integrated robotics GUI environment "Choreonoid" developed by AIST. We equipped the data of reactor building and developed the advanced functions as follows.
1. Simulation of communication failure
Communication failure; band limitation, communication delay, packet loss, and jitter.
2. Simulation of UUV
3. Camera which can represent a situation of poor visibility.
Development of Standard Test Methods for nuclear emergency response robots
Standard test method(STM) focus on measuring the performance of robot which can not describe on the catalogue. STM for general disaster are proposed and developed by National Institute of Standards and Technology, but STM for nuclear disaster are not developed.
We design and develop the STM for nuclear emergency response robots, and aim to contribute to making a selection of robots which case in nuclear emergency response and enhancing the skill of operator.
Now, we analyze the operation history of robots deployed for nuclear facility and sample the important matter for robot movement. Hereafter, we design and make trial STM as required.